【实验视频】Franka Emika协作机器人在医疗行业的应用
信息导读:
【实验视频】Franka Emika协作机器人在医疗行业的应用
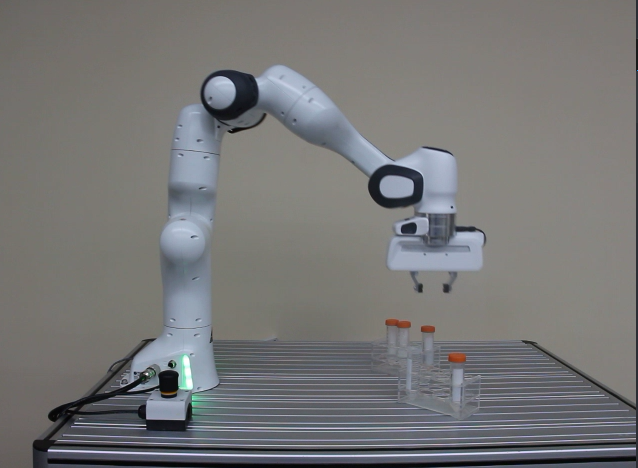
试管是常见的实验用品,并在实验时都需要操作者去手动摇晃,一般摇晃试管的方式分为水平画圆轨迹摇晃以及锥形轨迹摇晃,使得试验品与药剂混合充分,以达到所需的实验目的。 这些实验操作,动作看似简单,但操...
试管是常见的实验用品,并在实验时都需要操作者去手动摇晃,一般摇晃试管的方式分为水平画圆轨迹摇晃以及锥形轨迹摇晃,使得试验品与药剂混合充分,以达到所需的实验目的。
这些实验操作,动作看似简单,但操作一些危险的试剂时,可能会对操作者造成一定程度的危害,比如酸性或者碱性物质撒到手上易灼烧手;
是否有一种比较好的实现方法,既能满足实验的需求,同时还能实现和实验人员的完美配合,安全且轻松的完成所设置的任务?
从上述视频可以看到,Franka Emika协作机器人从打开试管瓶盖,夹取试管,将液体倒入另一试管,最后通过摆动,实现液体均匀混合,最终达到实验效果。
上述简单的实验动作看似简单,但是充分利用了Franka Emika机器人自身的核心性能优势:
利用自身力自适应特点,确保不会夹碎试管及试管盖;
-
利用自身旋转APP,实现瓶盖均匀拧下,动作流畅不偏移; -
利用Franka Emika协作机器人自身的可达性,在最小的空间,完成以上动作; -
利用力控的特点,完成机器人震荡及摇晃试管的功能。
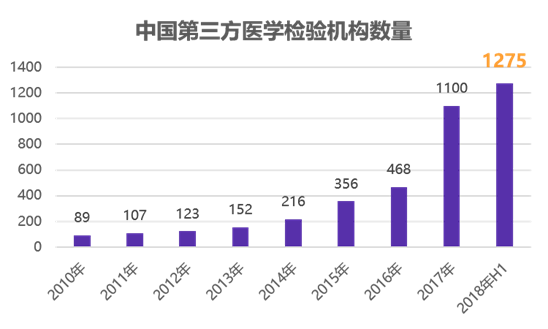
根据行业资料,2018年中国独立医学实验室(ICL, Independent Clinical Laboratory)由2010年的89家增加至2018年的接近1,300家。
但是ICL行业自身的一些特点:
同时,ICL检验趋向个体化,分子化,检验项目类型愈发多样,通过Franka Emika协作机器人配合其它医疗设备,将成为未来ICL行业的一个新的发展趋势。

